Sie sind nicht angemeldet.






..., es gibt in meinen Augen nichts schlimmeres wie ein Modell das wie ein Korken über die Wellen tanzt .
Hi Stef,
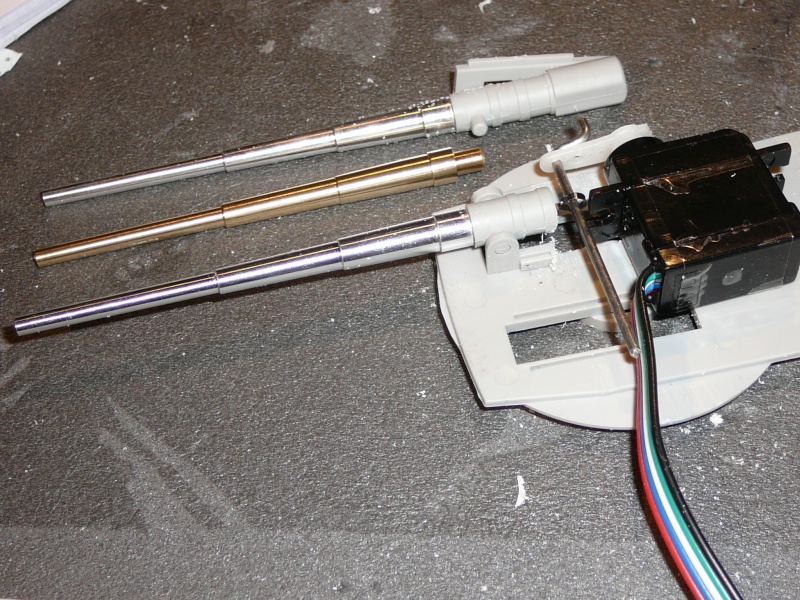
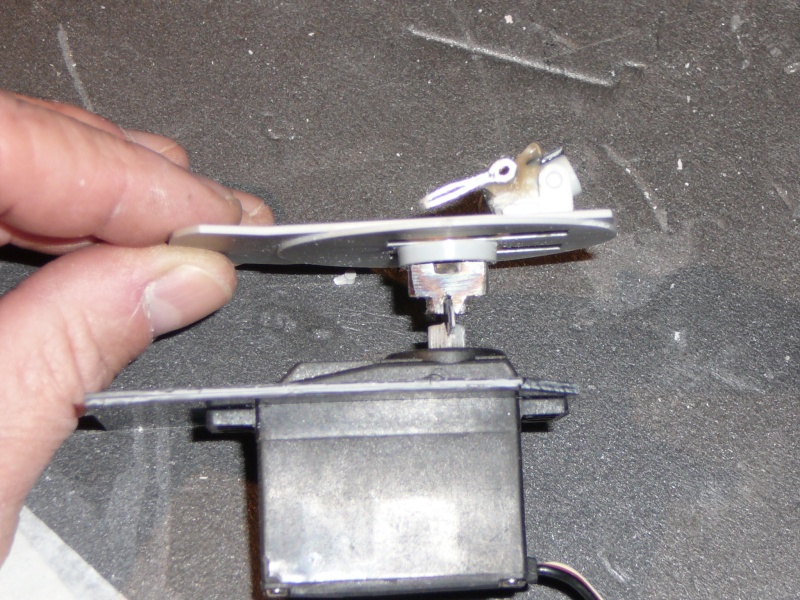
Das ganze mal von innen. Microservo und so ist alles nur mal lose hindrapiert. 2 Ösen durch die abgesägten Verschlüsse, Bolzen durch und ab zum Servo."
Könnte klappen, könnte klappen..."(...und, welcher Film?)

Da bin ich mal gespannt wie es weiter geht. Heben, senken und drehen, gleich drei DInge auf einmal.



Ähm. Bahnhof...
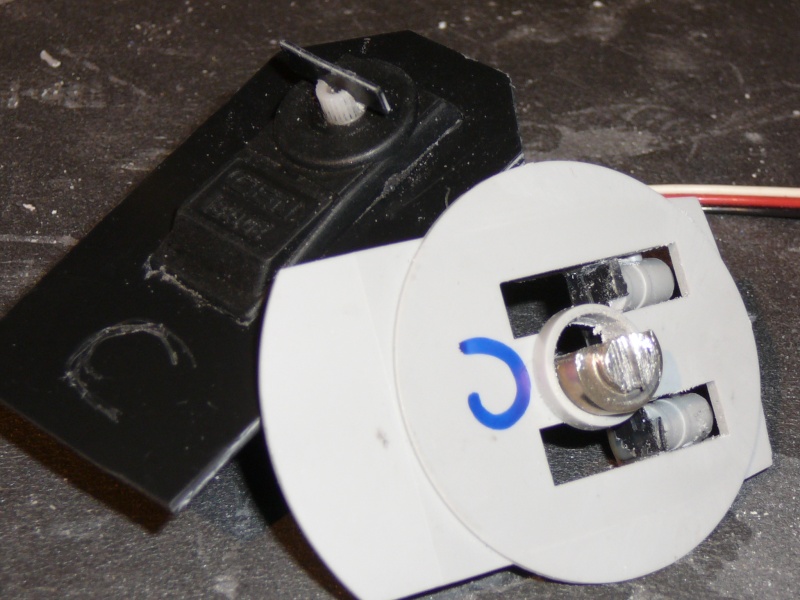
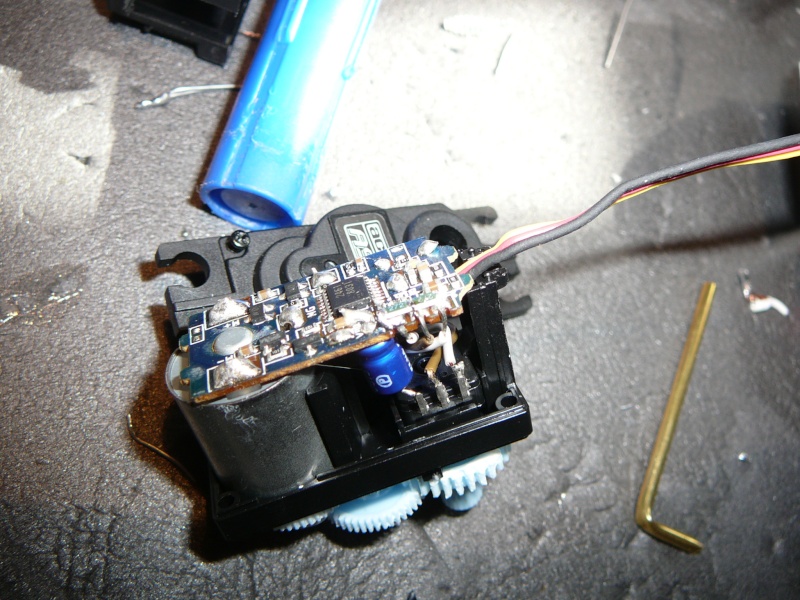
um aber wieder das Verhältnis am Ende von 1,5/3,5 zu bekommen, muss jetzt 3k/7k eingestellt werden, da 2,5k fest sind, wird das Poti bis 0,5k gedreht -> Das servo dreht also "weiter".

 -als ich einen Servomotor andersrum(die hinteren beiden Türme sollen ja in die gleiche Richtung drehen wie die vorderen beiden) eingelötet habe.
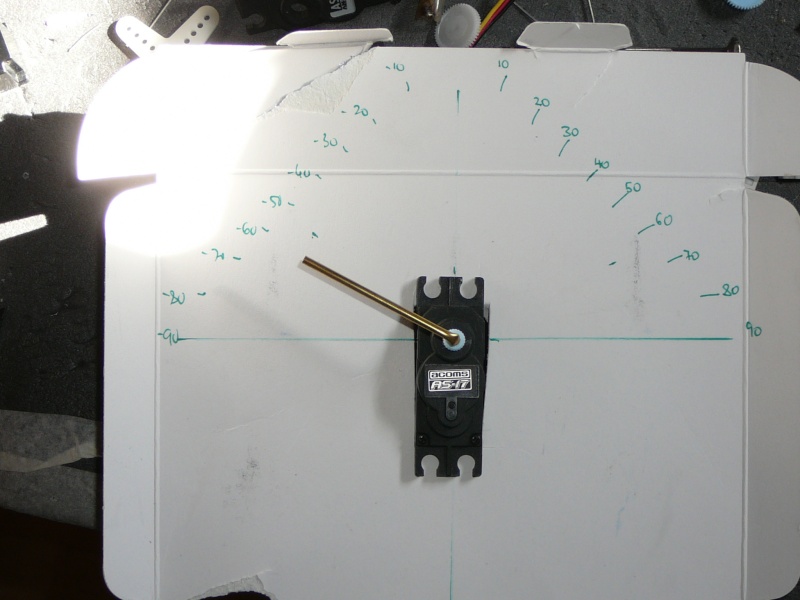
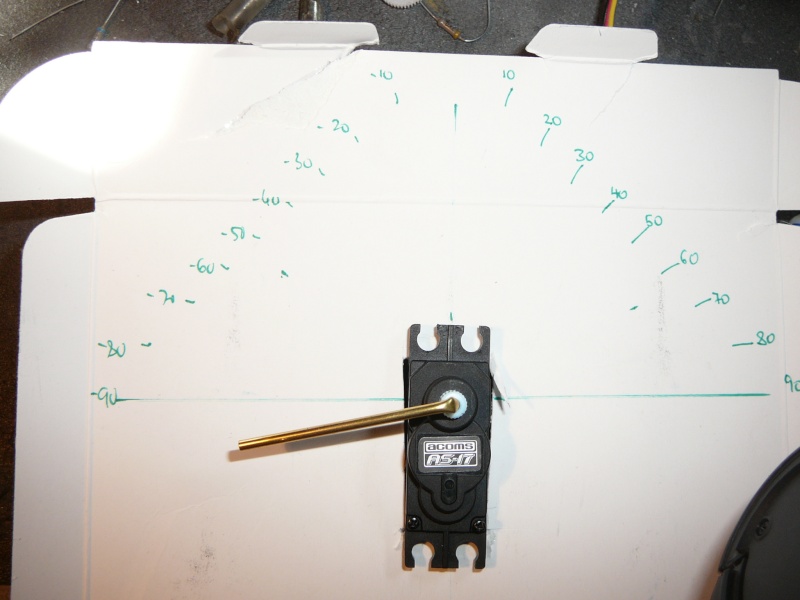
-als ich einen Servomotor andersrum(die hinteren beiden Türme sollen ja in die gleiche Richtung drehen wie die vorderen beiden) eingelötet habe. Kann mir jemand 4 Servos so umbauen, dass sie 180-240 Grad Drehung schaffen, 2 davon sollten andersrum drehen-wie oben schon angeführt.
Kann mir jemand 4 Servos so umbauen, dass sie 180-240 Grad Drehung schaffen, 2 davon sollten andersrum drehen-wie oben schon angeführt. 
Forensoftware: Burning Board®, entwickelt von WoltLab® GmbH
 Hat der LI gesagt...
Hat der LI gesagt...