Sie sind nicht angemeldet.
Lieber Besucher, herzlich willkommen bei: Das Wettringer Modellbauforum. Falls dies Ihr erster Besuch auf dieser Seite ist, lesen Sie sich bitte die Hilfe durch. Dort wird Ihnen die Bedienung dieser Seite näher erläutert. Darüber hinaus sollten Sie sich registrieren, um alle Funktionen dieser Seite nutzen zu können. Benutzen Sie das Registrierungsformular, um sich zu registrieren oder informieren Sie sich ausführlich über den Registrierungsvorgang. Falls Sie sich bereits zu einem früheren Zeitpunkt registriert haben, können Sie sich hier anmelden.
 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben  Woran ich sonst so bastele...
Woran ich sonst so bastele... 











 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...  Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 

 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 



 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 





 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
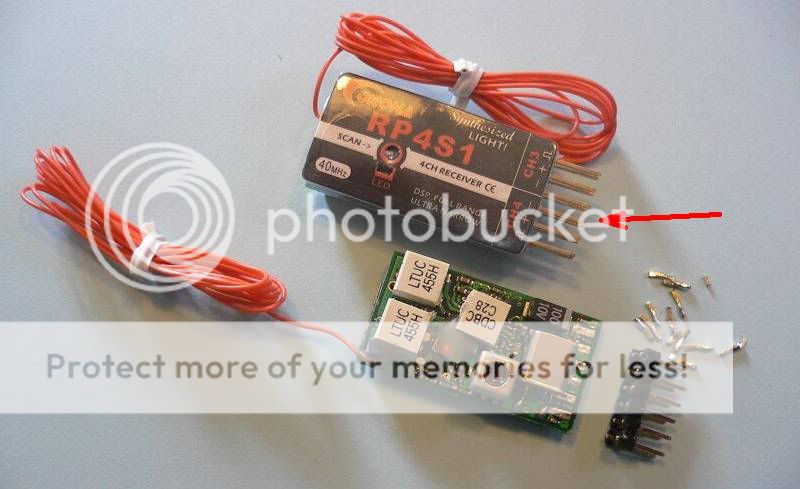
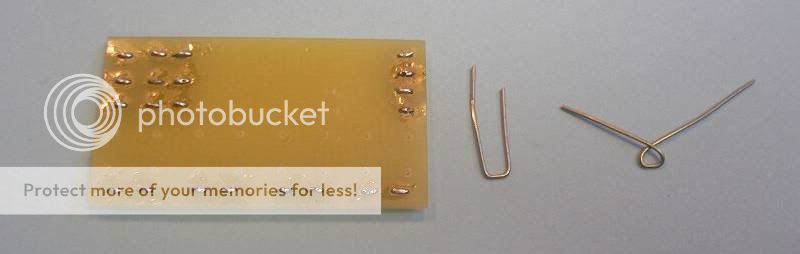
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... haben wir bereits wieder wertvolle 1,5 Gramm gewonnen

 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 



 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 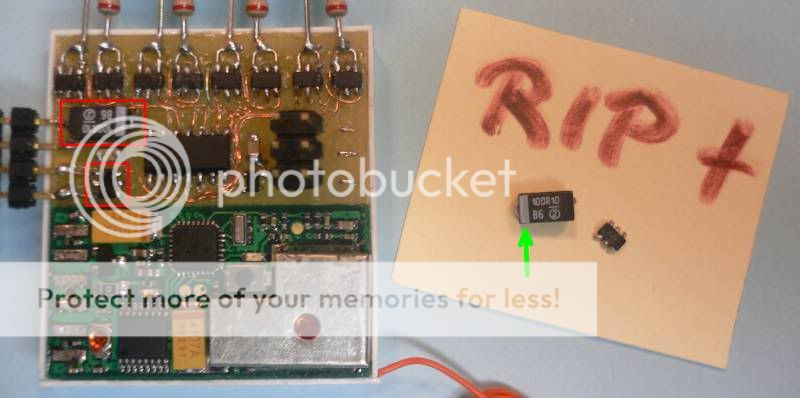

 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele... 


 Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...  ... bei mir siehts derzeit so schlecht aus mit Zeit, dass ich fast heuln könnte.
... bei mir siehts derzeit so schlecht aus mit Zeit, dass ich fast heuln könnte.  Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Ein Dampfgenerator mit Füllstandüberwachung Selbst gebaute Miniaturschiffschrauben Woran ich sonst so bastele...
Forensoftware: Burning Board®, entwickelt von WoltLab® GmbH

